


Here,i m introduced wireless robo car using encoder(ht12e), decoder(ht12d) (ic) and RF modual (433 MHz).here i m using l298 dual full bridge driver ic .it having 1A current source capability .
Now basic concept of wireless is transmit the information through the transmitter and receive these information through receiver but first communicate with each other synchronization is required between transmitter and receiver so i m using dip switch .through which i m adjust the code same in both Tx and Rx.
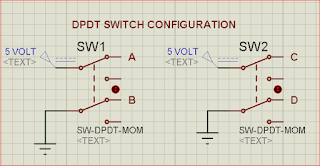
here, i am give you DPDT switch configuration in remote control .





l298 to view clik here
After implement your component in PCB is look like

uhhhhhhh!!! now your wireless robo car ready to drive
Let's go on long car drive with your GF......:) enjoyyyyy...
Now basic concept of wireless is transmit the information through the transmitter and receive these information through receiver but first communicate with each other synchronization is required between transmitter and receiver so i m using dip switch .through which i m adjust the code same in both Tx and Rx.
here, i am give you DPDT switch configuration in remote control .


Now ,pin diagram of ht12e and ht12d ic given below ,

For HT12d ,

Now ,main circuit diagram of transmitter and receiver circuit is given below .
Tx

Rx

l298 to view clik here
After implement your component in PCB is look like

uhhhhhhh!!! now your wireless robo car ready to drive
Let's go on long car drive with your GF......:) enjoyyyyy...




















